Sreenivasa Reddy Berahalli takes a deep dive into the E/E architecture underpinning increasingly software-defined vehicles
Traditional electronic control unit (ECU) architectures for vehicles are based on a distributed architecture, which relies on numerous purpose-built embedded system ECUs that incorporate vehicle features and functions. Due to these individual purpose-built systems, complexity and costs continue to increase. That’s one reason vehicle manufacturers are moving to new consolidated architectures in which centralised ECU computers can host multiple functions. In this context, two main vehicle ECU architecture trends are emerging: domain (zonal) controller architecture and central computer architecture.
History of electronic architectures
Automobiles were manufactured for more than 70 years before the first documented use of electronics occurred in the late 1960s, when the Volkswagen (VW) Type III, the world’s first compact car, had an ECU built into its engine to help control the car’s fuel injection—the Bosch D-Jetronic electronic fuel injection system By 1990, computer systems in cars were the standard rather than the exception. The 1991 Oldsmobile Custom Cruiser is said to be the last car built that did not run with the aid of a computer.
Traditional distributed architectures consist of many individual ECUs from various Tier-1 suppliers
With electromechanical technology continuing to evolve, ECUs have either replaced or been utilised to upgrade traditional mechanical-based control systems for better efficiency, control, and cost advantages. To demonstrate the progression of the benefits that this technology has to offer, one of the first iterations was the replacement of manual window cranks with push-button capabilities. Not only do ECU capabilities allow for this functionality with the use of a key fob, but the technology has advanced to the point that essentially every control within any vehicle today will be impacted by ECUs, from the airbags to anti-lock braking systems. During this evolution, the number of ECUs functioning within a vehicle has increased to approximately 50 while performing various functions, the most complex of which are related to Advanced Driver Assist Systems (ADAS) or semi-self-driving features.
Similarly, the electric vehicle control unit operates the battery charging, regenerative braking, hybrid powertrain, and other electric propulsion functions in hybrid and electric vehicles. Traditional distributed architectures consist of many individual ECUs from various Tier-1 suppliers, which increase the material costs, complex system integrations, and validation costs of the equipment’s original manufacturers.
The domain (zonal) controller architecture
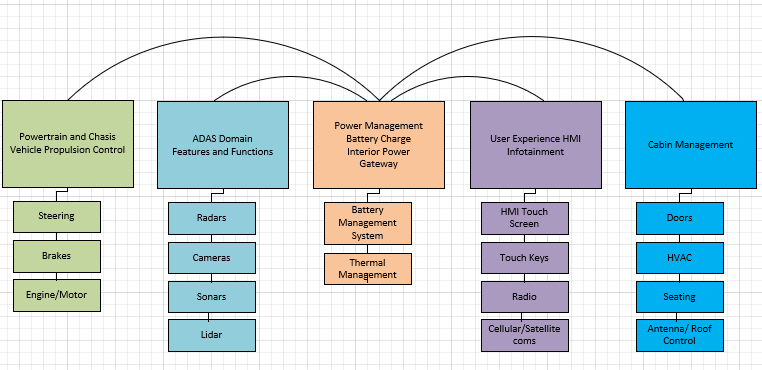
Domain controller architecture allows for similar controls to be orchestrated by relying on highly integrated, high-performance ECUs as a centralised style of system functionality. Each of these ECUs has dedicated roles over specific features, or domains. Five domain areas of control complete today’s vehicle features and functions: 1) chassis and powertrain; 2) power management; 3) user experience/human-machine interface; 4) ADAS system; and 5) cabin management. For example, the cabin management domain controller addresses all cabin sensing and control features, including locking and unlocking, immobilisers, air conditioning, and seat positioning. Similarly, autonomous driving feature-related sensors and ECUs are bundled into the ADAS domain, i.e., radars, cameras, sonars, and LiDAR.
Key features of domain controller architecture are replacing multiple low-performance ECUs with a smaller number of more powerful ECUs based on a zone operational perspective. The VW Group’s E3 architecture, or end-to-end electronic architecture, supports five highly integrated domain controllers: chassis and powertrain, external sensors, energy management, infotainment human-machine interface, and interior and lock. According to the manufacturer, two high-performance in-car application server (ICAS) computers power the E3, with tasks performed and distributed among smaller local control units. The ICAS modules raise the overall performance capabilities of the car’s hardware and software to a next-level spectrum of possibilities.
Domain controller architecture has several benefits for automotive applications and software-defined vehicles. These include lower system complexity, lower costs due to fewer components, and various flexibilities, such as virtual development and simulation, due to more features becoming computerised. The main disadvantages of this architecture are that certain domain control ECUs could become bottlenecked for vehicle network traffic, and increased cyber security vulnerabilities can arise as fewer ECUs control access to vehicle networks.
The central computer-based architecture
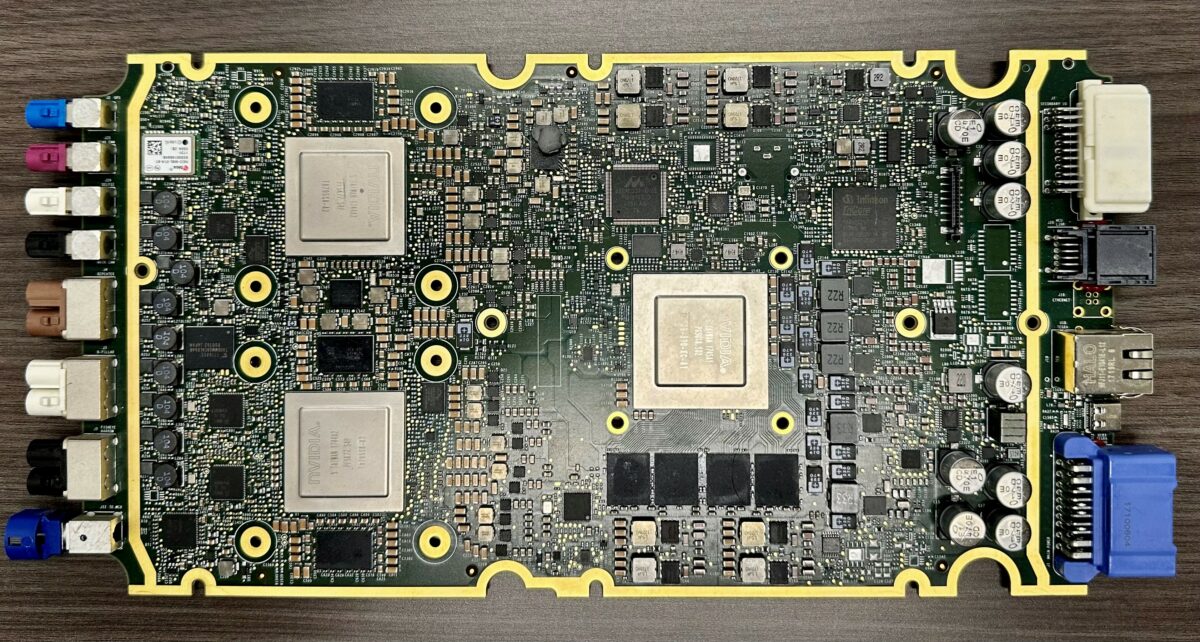
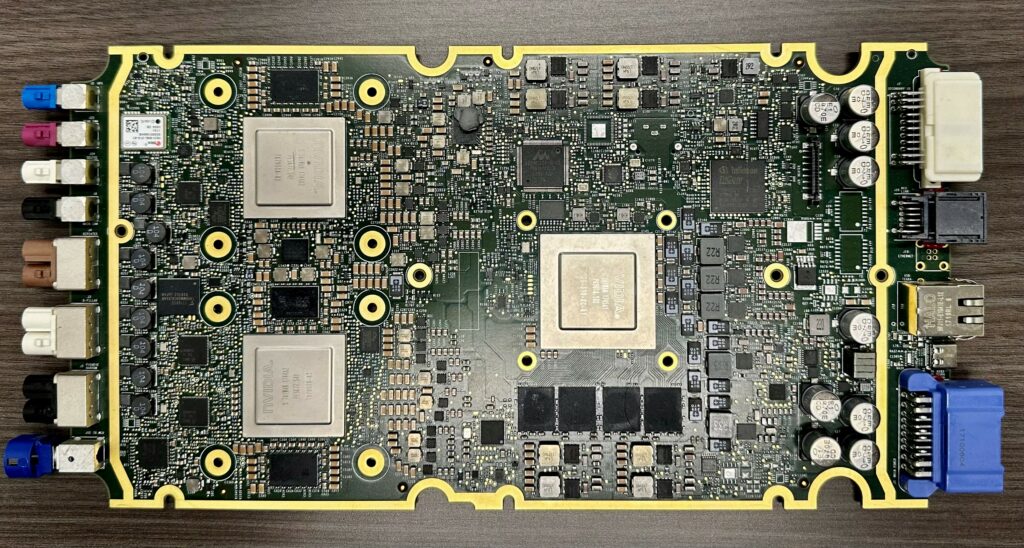
Centralised computing architecture takes a more aggressive approach towards consolidation, such as fewer central servers (or a group of closely connected servers). It is also relied upon to conduct all related sensing, processing, data storage, decision-making, vehicle management, and control functions for the vehicle. Due to a clean slate approach, Tesla has pioneered the centralised architecture, an autopilot system that utilises three Nvidia security operations centres (SoCs) to consolidate multiple distributed ECUs into fewer components (see figure below). Taking it further, Tesla has developed its SoCs to uniquely suit high-performance demands for autopilot, artificial intelligence, and other vehicle software needs.
Similarly, Waymo’s full self-driving cars have become known as vehicles that rely on a centralised processing system to distribute a software processing load. BMW, Daimler, Ford, General Motors, and VW have all gravitated to these architectures as well to enable smarter software-defined vehicles that offer better efficiency and more technology, primarily related to ADAS or full self-driving capabilities.
Vehicle manufacturers enjoy various benefits from these architectures. One reason is that they have fewer hardware parts to integrate. In addition, increased efficiency and the advantages of software technologies, such as benchtop simulation, virtual validation, and short software deployment cycles, are evident. The tradeoffs include higher initial costs to migrate these architectures. Central architectures require high-performance hardware. System complexity that’s moved into poorly developed software and infrastructure could lead to undesirable results.
Challenges faced with transitioning and forward-looking approaches
Statista states, “In 2030, it is forecasted that on average, electronic systems will account for half of the total price of a new car.” The number of ECUs needed has increased due to various features added to vehicles and traditional mechanical controllers being replaced with electronics and software. Innovations in the silicon industry are replacing purpose-built ECUs, where more capable processors and memory are available for lower prices and are beginning to become standardised.
Software-defined vehicles will continue to consolidate the number of ECUs required into one or two high-performance computers to realise most of the necessary vehicular functions. This will allow for shifting most available features as dedicated hardware-independent software applications. These features can also be easily migrated to different hardware with minimal effort.
Due to legacy reasons, costs, the supply chain, and other issues, there won’t be a single-step transition from current distributed architectures to highly consolidated zonal or central architecture trends. ECUs such as brakes and airbag control modules will continue to be integrated as standalone or de-central ECUs. Other developmental challenges include handling data exchanges between domains and the complexity of software functionality, tools, and infrastructure management, additional research and development costs, software management overhead, and management of cyber security vulnerabilities. Increased software simulation and virtual validation, continuous safety and security measures, and maintaining frequent over-the-air software updates will be essential to ace the challenges of these emerging architectures.
About the Author: Sreenivasa Reddy Berahalli is a Senior Software Engineering Manager at Magna Electronics